Introduction
This page covers principal stresses and strains. Although we have not yet discussed the many different definitions of stress and strain, it is in fact true that everything discussed here applies regardless of the type of stress or strain tensor. For example, if you calculate the principal values of a Cauchy stress tensor, then what you get are principal Caucy stresses. The principal values of a Green strain tensor will be principal Green strains.Everything below follows from two facts: First, the input stress and strain tensors are symmetric. Second, the coordinate transformations discussed here are applicable to stress and strain tensors (they indeed are).
We will talk about stress first, then strain.
2-D Principal Stresses
In 2-D, the transformation equations are{kind=link}
\[ \begin{eqnarray} \sigma'\!_{xx} & = & \sigma_{xx} \cos^2 \theta + \sigma_{yy} \, \sin^2 \theta + 2 \, \tau_{xy} \, \sin \theta \cos \theta \\ \\ \sigma'\!_{yy} & = & \sigma_{xx} \sin^2 \theta + \sigma_{yy} \, \cos^2 \theta - 2 \, \tau_{xy} \, \sin \theta \cos \theta \\ \\ \tau'\!_{xy} & = & (\sigma_{yy} - \sigma_{xx}) \sin \theta \cos \theta + \tau_{xy} (\cos^2 \theta - \sin^2 \theta) \end{eqnarray} \]
These are the expanded forms of \(\boldsymbol{\sigma}' = {\bf Q} \cdot \boldsymbol{\sigma} \cdot {\bf Q}^T\) in 2-D. They can also be derived from a force balance of the figure shown here. It is interesting that stress is characterized as a tensor because it follows the transformation equation. But this is primarily a mathematical argument, and it would carry little weight if it were not connected to the physics of the force balance. The fact that the coordinate transform equation properly reflects the force balance at different orientations is what makes it relevant.
The principal stresses are the corresponding normal stresses at an angle, \(\theta_P\), at which the shear stress, \(\tau'_{xy}\), is zero.
This page performs full 3-D tensor transforms, but can still be used for 2-D problems.. Enter values in the upper left 2x2 positions and rotate in the 1-2 plane to perform transforms in 2-D. The screenshot below shows a case of pure shear rotated 45° to obtain the principal stresses. Note also how the \({\bf Q}\) matrix transforms.
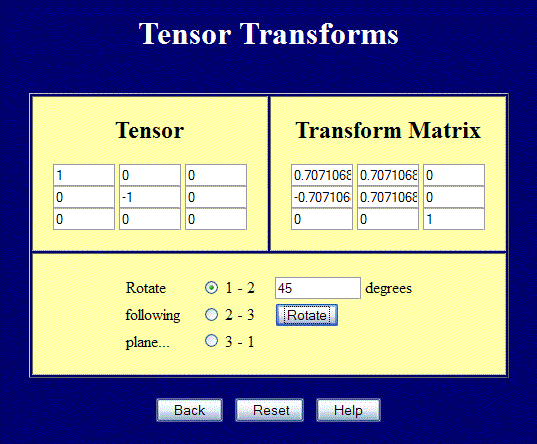
The figure below shows the stresses corresponding to the pure shear case in the tensor transform webpage example. The blue square aligned with the axes clearly undergoes shear. But the red square inscribed in the larger blue square only sees simple tension and compression. These are the principal values of the pure shear case in the global coordinate system.
{kind=link}
In 2-D, the principal stress orientation, \(\theta_P\), can be computed by setting \(\tau'\!_{xy} = 0\) in the above shear equation and solving for \(\theta\) to get \(\theta_P\), the principal stress angle.
\[ 0 = (\sigma_{yy} - \sigma_{xx}) \sin \theta_P \cos \theta_P + \tau_{xy} (\cos^2 \theta_P - \sin^2 \theta_P) \]
\[ \tan (2 \theta_P) \; = \; {2 \tau_{xy} \over \sigma_{xx} - \sigma_{yy} } \]
The transformation matrix, \({\bf Q}\), is
\[ {\bf Q} = \left[ \matrix{ \;\;\; \cos \theta_P & \sin \theta_P \\ -\sin \theta_P & \cos \theta_P } \right] \]
Inserting this value for \(\theta_P\) back into the equations for the normal stresses gives the principal values. They are written as \(\sigma_{max}\) and \(\sigma_{min}\), or alternatively as \(\sigma_1\) and \(\sigma_2\).
\[ \sigma_{max}, \sigma_{min} = {\sigma_{xx} + \sigma_{yy} \over 2} \pm \sqrt{ \left( {\sigma_{xx} - \sigma_{yy} \over 2} \right)^2 + \tau_{xy}^2 } \]
They could also be obtained by using \(\boldsymbol{\sigma}' = {\bf Q} \cdot \boldsymbol{\sigma} \cdot {\bf Q}^T\) with \({\bf Q}\) based on \(\theta_P\).
Principal Stress Notation
Principal stresses can be written as \(\sigma_1\), \(\sigma_2\), and \(\sigma_3\). Only one subscript is usually used in this case to differentiate the principal stress values from the normal stress components: \(\sigma_{11}\), \(\sigma_{22}\), and \(\sigma_{33}\).2-D Principal Stress Example
Start with the stress tensor{kind=link}
\[ \boldsymbol{\sigma} = \left[ \matrix{ 50 & \;\;\; 30 \\ 30 & -20 } \right] \]
The principal orientation is
\[ \begin{eqnarray} \tan (2 \theta_P) & = & {2 * 30 \over 50 - (\text{-}20) } \\ \\ \\ \theta_P & = & 20.3° \end{eqnarray} \]
The principal stresses are
\[ \begin{eqnarray} \sigma_{max}, \sigma_{min} & = & {50 - 20 \over 2} \pm \sqrt{ \left( {50 + 20 \over 2} \right)^2 + (30)^2 } \\ \\ \\ \sigma_{max}, \sigma_{min} & = & 61.1, -31.1 \end{eqnarray} \]
The only limitation to using these equations for principal values is that it is not known which one applies to 20.3° and which applies to 110.3°. That's why an attractive alternative is
\[ \begin{eqnarray} \left[ \matrix{\sigma'\!_{11} & \sigma'\!_{12} \\ \sigma'\!_{12} & \sigma'\!_{22} } \right] & = & \left[ \matrix { \;\;\;\cos(20.3^\circ) & \sin(20.3^\circ) \\ -\sin(20.3^\circ) & \cos(20.3^\circ) } \right] \left[ \matrix{50 & \;\;\;30 \\ 30 & -20 } \right] \left[ \matrix { \cos(20.3^\circ) & -\sin(20.3^\circ) \\ \sin(20.3^\circ) & \;\;\;\cos(20.3^\circ) } \right] \\ \\ \\ & = & \left[ \matrix{61.1 & \;\;\;0.0 \\ 0.0 & -31.1 } \right] \end{eqnarray} \]
This confirms that the 61.1 principal stress value in the \(\sigma_{11}\) slot is indeed 20.3° from the X-axis. The \(\sigma_{22}\) value is 90° from the first.
3-D Principal Stresses
Coordinate transforms in 3-D are\[ \left[ \matrix{\sigma'_{11} & \sigma'_{12} & \sigma'_{13} \\ \sigma'_{12} & \sigma'_{22} & \sigma'_{23} \\ \sigma'_{13} & \sigma'_{23} & \sigma'_{33} } \right] = \left[ \matrix { q_{11} & q_{12} & q_{13} \\ q_{21} & q_{22} & q_{23} \\ q_{31} & q_{32} & q_{33} } \right] \left[ \matrix{\sigma_{11} & \sigma_{12} & \sigma_{13} \\ \sigma_{12} & \sigma_{22} & \sigma_{23} \\ \sigma_{13} & \sigma_{23} & \sigma_{33} } \right] \left[ \matrix { q_{11} & q_{21} & q_{31} \\ q_{12} & q_{22} & q_{32} \\ q_{13} & q_{23} & q_{33} } \right] \]
The second \({\bf Q}\) matrix is once again the transpose of the first.
This page performs tensor transforms.
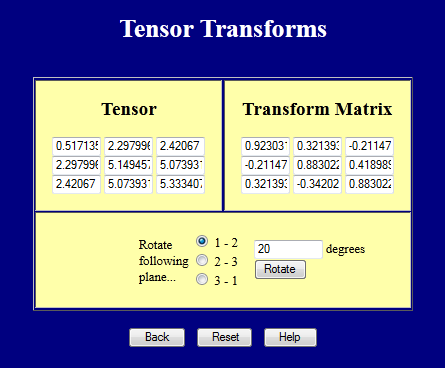
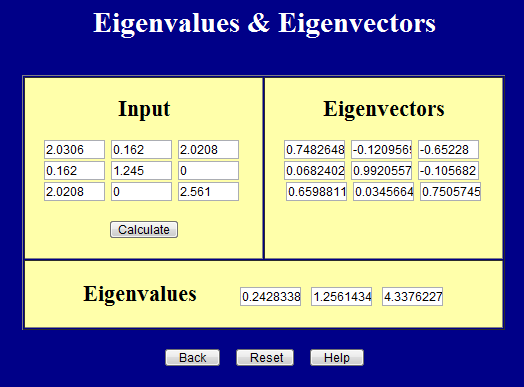
And this page calculates principal values (eigenvalues) and principal directions (eigenvectors).
It's important to remember that the inputs to both pages must be symmetric. In fact, both pages enforce this.
The eigenvalues above can be written in matrix form as
\[ \boldsymbol{\sigma} = \left[ \matrix{ 24 & 0 & 0 \\ 0 & 125 & 0 \\ 0 & 0 & 433 } \right] \]
Maximum Shear Stress
The maximum shear stress at any point is easy to calculate from the principal stresses. It is simply\[ \tau_{max} = {\sigma_{max} - \sigma_{min} \over 2} \]
This applies in both 2-D and 3-D. The maximum shear always occurs in a coordinate system orientation that is rotated 45° from the principal coordinate system. For the principal stress tensor above
\[ \boldsymbol{\sigma} = \left[ \matrix{ 24 & 0 & 0 \\ 0 & 125 & 0 \\ 0 & 0 & 433 } \right] \]
The max and min principal stresses are in the \(\sigma_{33}\) and \(\sigma_{11}\) slots, respectively. So the max shear orientation is obtained by rotating the principal coordinate system by 45° in the (\(1-3\)) plane.
The max shear value itself is
\[ \begin{eqnarray} \tau_{max} & = & {\sigma_{max} - \sigma_{min} \over 2} \\ \\ & = & (433 - 24) / 2 \\ \\ & = & 204 \end{eqnarray} \]
2-D Principal Strains
The mechanics of computing principal strains is identical to that for computing principal stresses. The only potential pitfall to keep in mind is that the equations always operate on one-half of the shear values, \(\gamma / 2\).\[ \begin{eqnarray} \epsilon'\!_{xx} & = & \epsilon_{xx} \cos^2 \theta + \epsilon_{yy} \, \sin^2 \theta + 2 \left( {\gamma_{xy} \over 2} \right) \sin \theta \cos \theta \\ \\ \epsilon'\!_{yy} & = & \epsilon_{xx} \sin^2 \theta + \epsilon_{yy} \, \cos^2 \theta - 2 \left( {\gamma_{xy} \over 2} \right) \sin \theta \cos \theta \\ \\ {\gamma'\!_{xy} \over 2} & = & (\epsilon_{yy} - \epsilon_{xx}) \sin \theta \cos \theta + \left( {\gamma_{xy} \over 2} \right) (\cos^2 \theta - \sin^2 \theta) \end{eqnarray} \]
The equations are written in terms of \(\gamma / 2\) to emphasize that half of all the shear values are used in the transformation equations.
This page performs full 3-D tensor transforms, but can still be used for 2-D problems.. Enter values in the upper left 2x2 positions and rotate in the 1-2 plane to perform transforms in 2-D. The screenshot below shows a case of pure shear rotated 45° to obtain the principal strains. Note also how the \({\bf Q}\) matrix transforms.
The figure below shows the deformed shapes corresponding to the pure shear case in the tensor transform webpage example. The blue square aligned with the axes clearly undergoes shear. But the red square inscribed in the larger blue square only sees simple tension and compression. These are the principal values of the pure shear deformation in the global coordinate system.
{kind=link}
In 2-D, the principal strain orientation, \(\theta_P\), can be computed by setting \(\gamma'\!_{xy} = 0\) in the above shear equation and solving for \(\theta\) to get \(\theta_P\), the principal strain angle.
\[ 0 = (\epsilon_{yy} - \epsilon_{xx}) \sin \theta_P \cos \theta_P + \left( {\gamma_{xy} \over 2} \right) (\cos^2 \theta_P - \sin^2 \theta_P) \]
This gives
\[ \tan (2 \theta_P) \; = \; {\gamma_{xy} \over \epsilon_{xx} - \epsilon_{yy} } \; = \; {2 \epsilon_{xy} \over \epsilon_{xx} - \epsilon_{yy} } \]
The transformation matrix, \({\bf Q}\), is
\[ {\bf Q} = \left[ \matrix{ \;\;\; \cos \theta_P & \sin \theta_P \\ -\sin \theta_P & \cos \theta_P } \right] \]
Inserting this value for \(\theta_P\) back into the equations for the normal strains gives the principal values. They are written as \(\epsilon_{max}\) and \(\epsilon_{min}\), or alternatively as \(\epsilon_1\) and \(\epsilon_2\).
\[ \epsilon_{max}, \epsilon_{min} = {\epsilon_{xx} + \epsilon_{yy} \over 2} \pm \sqrt{ \left( {\epsilon_{xx} - \epsilon_{yy} \over 2} \right)^2 + \left( \gamma_{xy} \over 2 \right)^2 } \]
They could also be obtained by using \({\bf E}' = {\bf Q} \cdot {\bf E} \cdot {\bf Q}^T\) with \({\bf Q}\) based on \(\theta_P\).
Principal Strain Notation
Principal strains can be written as \(\epsilon_1\), \(\epsilon_2\), and \(\epsilon_3\). Only one subscript is usually used in this case to differentiate the principal strain values from the normal strain components: \(\epsilon_{11}\), \(\epsilon_{22}\), and \(\epsilon_{33}\).2-D Principal Strain Example
Start with the strain tensor{kind=link}
\[ \boldsymbol{\epsilon} = \left[ \matrix{ 0.50 & \;\;\; 0.30 \\ 0.30 & -0.20 } \right] \]
The principal orientation is
\[ \begin{eqnarray} \tan (2 \theta_P) & = & {2 * 0.3 \over 0.50 - (\text{-}0.20) } \\ \\ \\ \theta_P & = & 20.3° \end{eqnarray} \]
The principal strains are
\[ \begin{eqnarray} \epsilon_{max}, \epsilon_{min} & = & {0.50 - 0.20 \over 2} \pm \sqrt{ \left( {0.50 + 0.20 \over 2} \right)^2 + (0.30)^2 } \\ \\ \\ \epsilon_{max}, \epsilon_{min} & = & 0.611, -0.311 \end{eqnarray} \]
The only limitation to using these equations for principal values is that it is not known which one applies to 20.3° and which applies to 110.3°. That's why an attractive alternative is
\[ \begin{eqnarray} \left[ \matrix{\epsilon'\!_{11} & \epsilon'\!_{12} \\ \epsilon'\!_{12} & \epsilon'\!_{22} } \right] & = & \left[ \matrix { \;\;\;\cos(20.3^\circ) & \sin(20.3^\circ) \\ -\sin(20.3^\circ) & \cos(20.3^\circ) } \right] \left[ \matrix{0.50 & \;\;\;0.30 \\ 0.30 & -0.20 } \right] \left[ \matrix { \cos(20.3^\circ) & -\sin(20.3^\circ) \\ \sin(20.3^\circ) & \;\;\;\cos(20.3^\circ) } \right] \\ \\ \\ & = & \left[ \matrix{0.611 & \;\;\;0.000 \\ 0.000 & -0.311 } \right] \end{eqnarray} \]
This confirms that the 0.611 principal strain value in the \(\epsilon_{11}\) slot is indeed 20.3° from the X-axis. The \(\epsilon_{22}\) value is 90° from the first.
3-D Principal Strains
Coordinate transforms in 3-D are\[ \left[ \matrix{E'_{11} & E'_{12} & E'_{13} \\ E'_{12} & E'_{22} & E'_{23} \\ E'_{13} & E'_{23} & E'_{33} } \right] = \left[ \matrix { q_{11} & q_{12} & q_{13} \\ q_{21} & q_{22} & q_{23} \\ q_{31} & q_{32} & q_{33} } \right] \left[ \matrix{E_{11} & E_{12} & E_{13} \\ E_{12} & E_{22} & E_{23} \\ E_{13} & E_{23} & E_{33} } \right] \left[ \matrix { q_{11} & q_{21} & q_{31} \\ q_{12} & q_{22} & q_{32} \\ q_{13} & q_{23} & q_{33} } \right] \]
The second \({\bf Q}\) matrix is once again the transpose of the first.
This page performs tensor transforms.
And this page calculates principal values (eigenvalues) and principal directions (eigenvectors).
It's important to remember that the inputs to both pages must be symmetric. In fact, both pages enforce this.
The eigenvalues above can be written in matrix form as
\[ {\bf E} = \left[ \matrix{ 0.243 & 0 & 0 \\ 0 & 1.256 & 0 \\ 0 & 0 & 4.338 } \right] \]
Maximum Shear
The maximum amount of shear at any point is easy to calculate from the principal strains. It is simply\[ \gamma_{max} = \epsilon_{max} - \epsilon_{min} \]
This applies in both 2-D and 3-D. The maximum shear always occurs in a coordinate system orientation that is rotated 45° from the principal coordinate system. For the principal strain tensor above
\[ {\bf E} = \left[ \matrix{ 0.243 & 0 & 0 \\ 0 & 1.256 & 0 \\ 0 & 0 & 4.338 } \right] \]
The max and min principal strains are in the \(E_{33}\) and \(E_{11}\) slots, respectively. So the max shear orientation is obtained by rotating the principal coordinate system by 45° in the (\(1-3\)) plane.
The max shear value itself is
\[ \begin{eqnarray} \gamma_{max} & = & \epsilon_{max} - \epsilon_{min} \\ \\ & = & 4.338 - 0.243 \\ \\ & = & 4.095 \end{eqnarray} \]
Summary
\[ {\bf A}' = {\bf Q} \cdot {\bf A} \cdot {\bf Q}^T \]
where \({\bf A}\) is "any symmetric matrix."
And recall that the product of any matrix with its transpose is always a symmetric result, so this result would qualify. This is especially relevant to \({\bf F}^T \! \cdot {\bf F}\), whose invariants are used in the Mooney-Rivlin Law of rubber behavior. Mooney-Rivlin's Law and coefficients will be discussed on this page. As an added teaser, we will see that the 3rd invariant of \({\bf F}^T \! \cdot {\bf F}\) for rubber always equals 1 because rubber is incompressible. So not only is it a constant, independent of coordinate transformations, but it is even a constant value, always equal to 1, independent of coordinate transformations and the state of deformation.